
In this article, we will study the characteristics of the DC series motors. Characteristics of DC series motor are:
1. Speed and armature current (N/Ia characteristic).
2. Torque and armature current (Ta/Ia characteristic). It is known as an electrical characteristic.
3. Speed and torque (N/Ta characteristic) – It is also known as a mechanical characteristic. It can be found from (1) and (2) above.
While discussing DC motor characteristics, the following two relations should always be kept in mind :
Ta ∝ ΦIa and
N ∝ Eb/Φ
1. Speed And Current characteristics
Since the speed of the DC motor is given by;
N= k(E/Φ) , where k= proportionality constant.
N ∝ Eb/Φ
N = k{(V – IR)/Φ}
The resistance of the armature is very small so voltage drop (IR) can be neglected and supply voltage is constant. So speed is inversely proportional to flux.
Now, in the DC series motor, the flux is produced by the armature current flowing in field winding. So flux produced is directly proportional to the armature current. Hence speed of the series motor becomes inversely proportional to the armature current.
The curve between them is a rectangular hyperbola.

Fig. Speed – current characteristics
Thus, when the armature current is low the speed will be very large. Therefore, at no load or light load, there is a possibility of dangerously high speed, which may damage the rotor. Hence, the DC series motor should never be run at no load.
Characteristics Of Dc Shunt Motor
2. Torque and armature current characteristics
Torque in the case of a DC motor is directly proportional to the product of flux and armature current.
But in the DC series motor, flux is directly proportional to the armature current up to saturation. Hence, torque becomes directly proportional to the square of the armature current up to saturation.
Hence, the curve is parabola up to saturation. After saturation flux becomes independent of the armature current and hence torque becomes proportional to the armature current only.
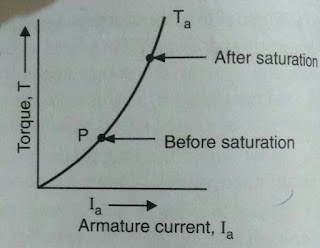
Fig. Torque – Current characteristics
Thus, the dc series motor has very high starting torque.
3. Speed and Torque Characteristics
The speed-torque characteristics of the series motor can be derived from speed-current and torque-current characteristics.

Fig. Speed – Torque Characteristics
Thus, it shows that the DC series motor has high torque at low speed and vice-versa.
This property makes the DC series motor useful for traction purposes.

