PRIMARY SECONDARY AND TERTIARY FREQUENCY CONTROL
PRIMARY CONTROL:
Primary control consists of changing a generating unit’s power versus the frequency, according to its static generation characteristic as determined by the speed governor settings.
The objective of primary control is to re-establish a balance between generation and demand within the synchronous area at a frequency different from the nominal value. This is done at the expense of the kinetic energy of rotating masses of generating sets and connected motors.
The primary control action time is 0 to 30 s after the disturbance of the balance between generation and demand.
Under normal conditions the system operates at nominal frequency, maintaining the condition of equality of generated power and demand. Each disturbance of this balance, due to, for example, the disconnection of a large generating unit or connection of a large load, causes a change in frequency. At first, the frequency varies rapidly, practically linearly, and attains the maximum deviation from the nominal value, referred to as the dynamic frequency deviation (Figure 1).
 |
| Figure 1 Definition of the dynamic (Δfdyn) and quasi-steady-state frequency (Δf) deviation |
This deviation in the system frequency will cause the primary controllers of all generators subject to primary control to respond within a few seconds. The controllers alter the power delivered by the generators until a balance between the power output and consumption is re-established. At the moment when the balance is reestablished, the system frequency stabilizes and remains at a quasi-steady-state value, but differs from the frequency set point because of the generators’ droop.
The magnitude of the dynamic frequency deviation depends on: the amplitude and development over time of the disturbance affecting the balance between power output and consumption; the kinetic energy of rotating machines in the system; the number of generators subject to primary control; the dynamic characteristics of the machines (including controllers); and the dynamic characteristics of loads. The quasi-steady-state frequency deviation is governed by the amplitude of the disturbance and the system stiffness.
The contribution of a generator to primary control depends upon the drop of the generator and the primary control reserve of the generator concerned. Figure 2 shows the characteristics of two generators a and b and of different droops under equilibrium conditions, but with identical primary control reserves. In the case of a minor disturbance, for which the frequency offset is smaller than Δfa, the contribution of generator a (with the smaller droop) will be greater than that of generator b (the one with the greater droop).
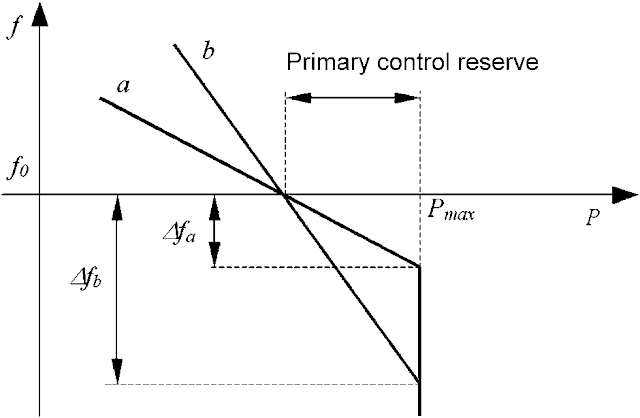 |
| Figure 2 The contribution of two generators, with different droops, to primary control |
The primary control reserve of generator a is exhausted (i.e. where the power generating output reaches its maximum value) earlier (at the frequency offset Δfa) than that of generator b (which will be exhausted at the frequency offset Δfb), even when both generators have identical primary control reserves.
For an adequate operation of frequency control, it is crucial that the system has a proper level of primary control reserve at any instant of time allocated in a possibly large number of generating units and activated within a few seconds of detecting the frequency deviating from its nominal value.
SECONDARY CONTROL:
Secondary control makes use of a central regulator, modifying the active power set points of generating sets subject to secondary control, in order to restore power interchanges with adjacent control areas to their programmed values and to restore the system frequency to its set-point value at the same time. By altering the operating points of individual generating units, secondary control ensures that the full reserve of primary control power activated will be made available again.
Secondary control operates slower than primary control, in a timeframe of minutes. Its action becomes evident about 30 s after a disturbance/event and ends within 15 min.
Since under normal operating conditions of a power system, the power demand varies continuously, secondary control takes place continually in such a way as not to impair the action of primary control.
Secondary control requires a central regulator; a system measuring the interchanged power in tie-lines; measurements of the system frequency; and a system for transmission of regulator signals to the relevant generating units.
The central regulator minimizes in real-time the system control error G, expressed as
G = Pmeasure−Pprogram+K (fmeasure−f0)
where Pmeasure is the sum of the instantaneous measured active power transfers on the tie-lines; Pprogram is the resulting programmed exchange with all the neighboring control areas; K, the system factor, is a constant in MW/Hz set on the secondary controller; fmeasure is the measured instantaneous value of system frequency; and f0 is the set-point (nominal) frequency.
The desired behavior of secondary control over time will be obtained by assigning a proportional-integral (PI) characteristic of the central regulator, according to the following equation:
ΔPd=−B.G−1T∫Gdt
Where Pd is the correction signal of the central regulator governing the generating units subject to secondary control; B is the gain (proportional term) of the central regulator; T is the integral time constant of the central regulator; and G is the system control error.
A disturbance of the balance between power generation and demand in synchronous systems gives rise to variations in the system frequency observed over the entire system despite the location of the disturbance. In such cases, a joint reaction of primary control of all interconnected systems is foreseen in order to re-establish the balance between generation and demand. The result will be achieved at a frequency differing from its set-point value by Δf, and the power interchanges on tie lines will be different from the scheduled values.
Whereas during primary control all systems provide mutual support, only the system in which the unbalance occurred is required to undertake secondary control action. The controller of this system activates appropriate secondary control power restoring the nominal frequency and scheduled power exchanges.
In order to provide effective secondary control, the generating units that contribute to this control process must have sufficient power reserve to be able to respond to the regulator signal with both the required change in generated power and the required rate of change.
The rate of change in the power output at the generator terminals significantly depends on the generation technique. Typically, for oil or gas-fired power stations, this rate is about 8% per min, for lignite-fired and hard-coal-fired power stations it is up to 2% and 5% per min, respectively, and for nuclear power stations this rate is up to 5% per min. Even in the case of reservoir power stations, the rate is 2.5% of the rated plant output per second.
The secondary control range is the range of adjustment of the secondary control power, within which the central regulator can operate automatically, in both directions (positive and negative) from the working point of the secondary control power. The secondary control power is the portion of the secondary control range already activated at the working point.
The secondary control reserve is the positive part of the secondary control range between the working point and the maximum value.
TERTIARY CONTROL:
Tertiary control is any automatic or manual change in the working points of the generating units participating, in order to restore an adequate secondary control reserve or to provide desired (in terms of economic considerations) allocation of this reserve within the set of generating units in service.
Tertiary control may be achieved by means of changing the set operating points of thermal power plant generation sets, around which the primary and secondary control acts; connection/disconnection of pump storage hydropower stations operated the intervention mode; altering the power interchange program; and load control (centralized telecommand system or controlled load shedding). The timing of the primary, secondary, and tertiary control ranges is shown in Figure 3.
A frequency control system, comprising primary, secondary, and tertiary control, ensures frequency control under normal operating conditions of a power system. In such cases, frequency remains within the range of permissible variation.
Where the frequency variation exceeds the permissible range, due to a significant loss of generation or consumed power, the system conditions are deemed impaired (emergency) conditions. In such circumstances, supplementary actions are needed in order to re-establish the active power balance. These include:
• Emergency load tripping (system load shedding) in case of a major frequency drop;
• Emergency disconnection of generators in case of a large frequency increase.
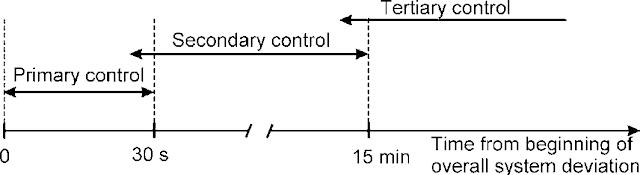 |
| Figure 3 The timing of the primary, secondary, and tertiary control ranges in a power system |
Related Topic – click here
- What Is A Diode? Working Principle & Types | Different Types Of Resistors
- What Is Synchronous Speed? | Types & Advantages Of DC Motors
- Working Principle Of Linear Variable Differential Transformer | Construction & Piezoelectric Transducers
- Three-Phase Induction Motor | 3-Phase Induction Motor Principle
- Introduction To Electrical Transformer | Definition, Construction & Parts Of A Transformer | Types Of Transformers
- DC Generator | Principle Of Operation, Construction, Types Of Generators & Application
- What Is DC Motor? | Principle Of DC Motor & Types Of DC Motors
- Diode-Circuits |Diode Convention, Transformer Rectifier & Objective Questions With Answer

